测量原理
导波雷达是基于时间行程原理的测量仪表,雷达波以光速运行,运行时间可以通过电子部件被转换成物位信号。探头发出高频脉冲并沿缆式或杆式探头传导,当脉冲遇到物料表面时反射回来被仪表内的接收器接收并将距离信号转化为物位信号。
◇输入
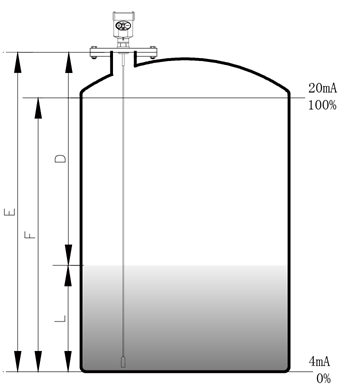
反射的脉冲信号沿缆绳传导至仪表电子线路部分,微处理器对此信号进行处理,识别出微波脉冲在物料表面所产生的回波。正确的回波信号识别由智能软件完成,距离物料表面的距离 D 与脉冲的时间行程 T 成正比: D=C×T/2 其中 C 为光速
因空罐的距离 E 已知,则物位 L 为: L=E-D
◇输出
通过输入空罐高度 E(= 零点),满罐高度 F(= 满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量环境。对应于 4 - 20mA 输出。
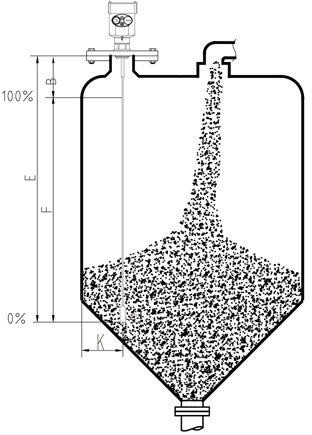
测量范围
F---- 测量范围
E---- 空罐距离
B---- 顶部盲区
K---- 探头到罐壁的最小距离
顶部盲区是指物料最高面与测量参考点之间的最小距离。 底部盲区是指缆绳最底部附近无法精确测量的一段距离。 顶部盲区和底部盲区之间是有效测量距离。
注意: 只有物料处于顶部盲区和底部盲区之间时, 才能保证罐内物位的可靠测量
外壳:
| 外壳和外壳盖之间的密封 |
硅橡胶 |
| 外壳视窗 |
聚碳酸酯 |
| 接地端子 |
不锈钢
|
技术参数:
工作频率 |
100MHZ-1.8GHZ |
| 测量范围 |
缆式:0-30m |
重复性 |
±2mm |
分辨率 |
1mm |
采样 |
回波采样 55 次 /s |
响应速度 |
>0.2S(根据具体使用情况而定) |
输出电流信号 |
4-20mA |
精度 |
±3mm |
通讯接口 |
HART 通讯协议 |
过程连接 |
G1'A/G1½'A 螺纹法兰 DN50,DN80,DN100, DN150,DN200,DN250 |
过程压力 |
-0.1-4MPa |
电源 |
24VDC(±10%), 纹波电压:1Vpp 耗电量:max 22.5mA |
环境条件 |
温度 -40℃~ +70℃ |
外壳防护/防爆等级 |
IP67 / Exd IIC T4 Gb |
两线制接线 |
仪表供电和信号输出共用一根两芯屏蔽电缆线 |
电缆入口 |
2 个 M20*1.5 或 ½'NPT( 电缆直径 5--9mm) |
测量距离:下表列出不同类别被测介质与测量距离的关系
介质分组 |
DK(ε) |
固体颗粒 |
液体 |
测量范围 |
1 |
1.4~16 |
|
-冷凝气,如 N2CO2 |
3m(仅指同轴杆式探头) |
2 |
1.6~19 |
-塑料带粒子
-白灰石,特种水泥-糖 |
-液化气,如丙烷
-溶剂
-氟利昂 12/ 氟利昂
-棕榈油 |
25m |
3 |
1.9~25 |
-普通水泥,石膏 |
-矿物油,燃料 |
30m |
4 |
2.5~4 |
-谷物,种子
-石头
-砂粒 |
-苯,苯乙烯,甲苯
-呋喃
-萘 |
30m |
5 |
4~7 |
-潮湿的石头,矿石-盐 |
-氯苯,氯仿
-纤维素喷雾
-异氰盐酸,本胺 |
30m |
6 |
>7 |
-金属粉末
-碳黑
-煤炭 |
-含水液体
-酒精
-液氨 |
30m |
|

